




Robots shaped like flexible balls – called Super Ball Bots – could one day be rolling and bouncing around to explore the surface of Saturn’s largest moon, Titan. It’s a novel design that could save costs on the most difficult and expensive part of sending a robotic mission to another planet: landing safely on the planet’s surface.
Adrian Agogino, principal investigator for the Super Ball Bot project, describes it as a:
… radical departure from traditional rigid robotics to tensegrity robots.
Writing about the project at the NASA Ames website, Agogino explains that this robot, consisting of a series of interconnected rods and cables in the shape of a sphere, is based on a concept called tensegrity.
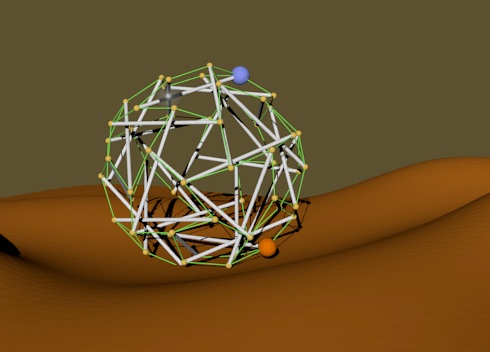
A term coined by Buckminster Fuller from “tensional integrity,” tensegrity is defined as a three-dimensional structure made of rigid components, like metal tubes, each joined without direct contact to a component with tension, like cables. Together, these two types of components maintain the integrity of a structure, be it a natural form like the musculoskeletal system or man-made constructions such as the 1,500-foot Kurilpa Bridge in Queensland, Australia, as in the image below.

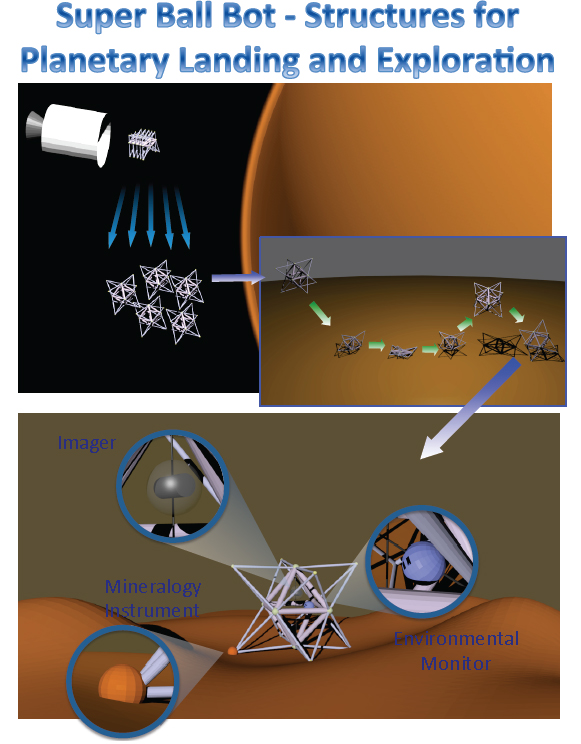
The future of robotic solar system exploration lies in low-cost foolproof flexible systems. A compact payload would reduce launch and transportation costs. The most dangerous phase of the mission, landing on the surface, needs to be done simply and safely. The robot would have to be nimble enough to handle the most challenging terrain.
Super Ball Bots carrying scientific instruments could be collapsed to create a lightweight compact payload for launch and transport to a destination in our solar system. They could be unpacked and deployed from orbit, directed towards a bouncy landing on a planet’s surface where elastic absorption of energy by the tensegrity structure would protect the centrally-located instrument packages from the force of impact. To move on the surface, the bot would use actuator motors in its tensional components to distort itself into rolling about the terrain.
However, driving a tensegrity structure is a lot harder than it looks in the video. The Super Ball Bot would have to be programmed to traverse different types of landscapes and deal with obstacles, perhaps teaching itself to improve its “walking” skills incrementally in order to adapt to specific terrains. Agogino and his team are currently working with small prototypes ball bots about three feet (one meter) in diameter, but the bots could be scaled to customize it for different science missions.

Bottom line: Scientists are designing an innovative new type of robot that may someday explore Saturn’s largest moon, Titan. Dubbed Super Ball Bot, this flexible sphere with a central instrument package is being designed to bounce to a landing on the surface, then roll about to explore the terrain by deforming itself. This design concept is known as tensegrity, a name for structures that have rigid components joined without direct contact to components under tension, such as metal rods connected with flexible cables.
Like what you read?
Subscribe and receive daily news delivered to your inbox.
More from
Editors of EarthSky










